
月と火星の植民地化は、私たちが宇宙への最初の大きな一歩を踏み出すことになるでしょう。しかし、これが現実になる前に克服しなければならない多くの障害があります。その一つは、宇宙で構造物を建設することができないことです。現在、構造物は地球で組み立てられ、その後宇宙に輸送されて組み立てられます。この方法は今のところ効果的ですが、長期間のミッションには適していないかもしれません。ここで、NASAのインチワームロボットが登場します。
NASAのエイムズ研究センターは、ARMADASと呼ばれるプロジェクトに取り組んでおり、大規模な構造物を建設するために必要なハードウェアとソフトウェアの開発を目指しています。アイデアは、インチワームのようなロボットと構造用のブロック、スマートアルゴリズムを使用して、材料を組み立て、修理し、再構成することです。この技術は、月、火星、または天体の周囲の任意の軌道で、人間の監視なしに使用できる可能性があります。
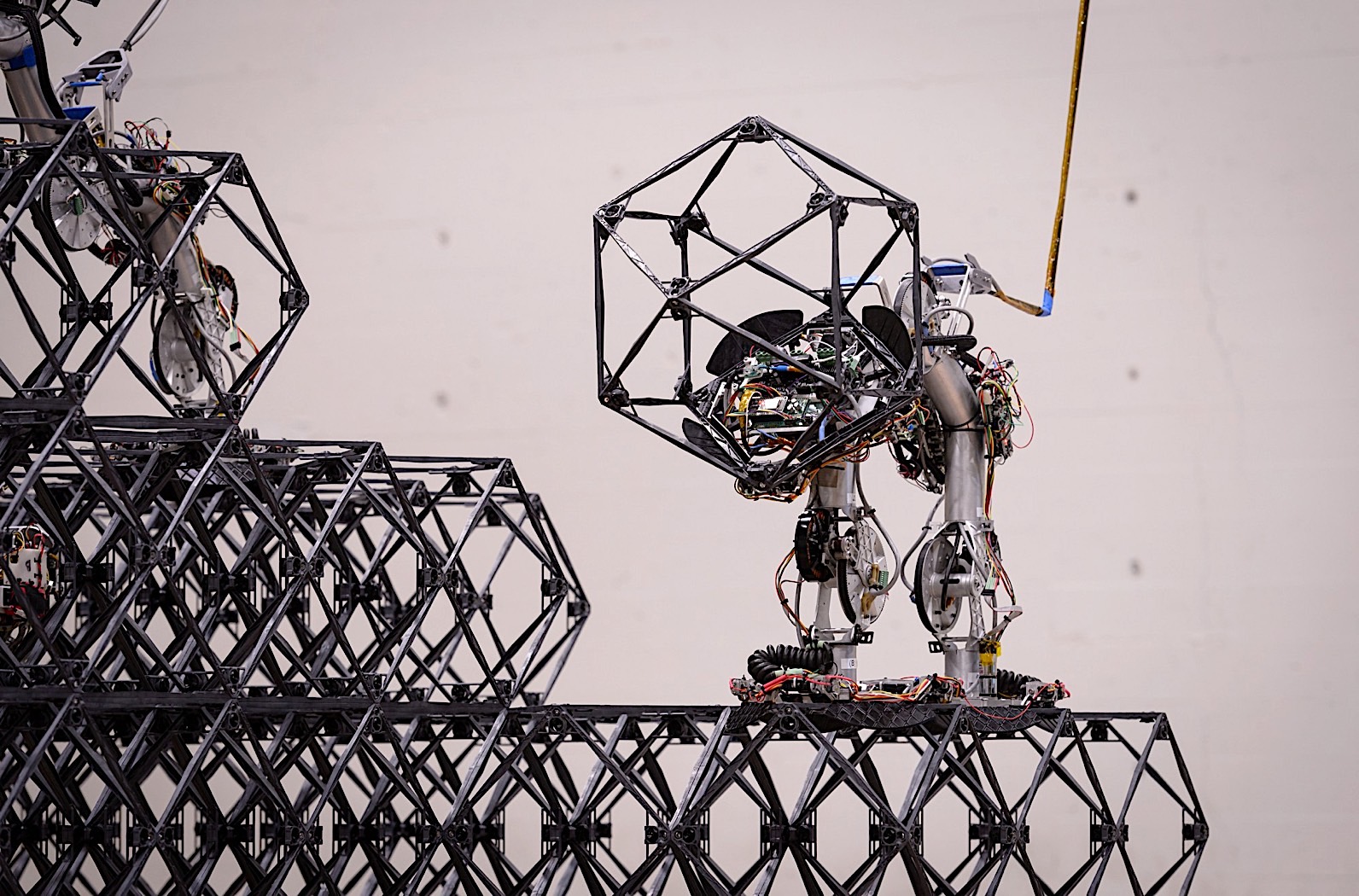
インチワームロボットは、背中を弓なりにして動くシンプルな機械生物です。彼らはラティス環境で操作し、特定のタスクを実行するように設計されています。彼らの主な目的は、建設ブロックを使用して人間が思い描くあらゆる構造物を作成することです。最近、NASAはエイムズ研究センターで、これらの自律ロボット3台とボリュメトリックピクセルまたはボクセルと呼ばれる3D建設ブロックを使用した実験を行いました。
デモで使用されたボクセルは、軽量の複合材料で作られており、キュボクタヘドロンの形をしています。彼らは平らな面を持つワイヤーフレームのサッカーボールに似ています。デモ中、2台のロボットは、供給ステーションから構造物の外部の建設現場に1つのボクセルを運びました。3台目のロボットの役割は、各ボクセルを構造物の残りの部分に固定することでした。
NASAはインチワームロボットとスマートアルゴリズムを活用することで、宇宙での構造物の建設方法を革命的に変えることを目指しています。この技術は、月や火星への長期ミッションをより実現可能でコスト効果の高いものにする可能性を秘めています。さらなる開発とテストを経て、インチワームロボットは未来の宇宙探査に欠かせないツールとなるでしょう。
NASAの驚くべきロボットが自律的に構造物を建設
画期的なテストにおいて、NASAのロボットは国際宇宙ステーションのトラスに匹敵する構造物を成功裏に建設しました。機械は自律的に操作され、テストの期間は公表されていませんが、その結果は小屋のサイズを持つ堅固で印象的な構造物です。
この素晴らしい成果を達成したチームは、この技術のいくつかの重要な側面を強調しています。まず第一に、ロボット自体は比較的シンプルな設計です。インチワームマシンは構造が容易で、各小さなステップを3Dグリッドに合わせることに依存しています。したがって、複雑な計算やセンサー機能は必要ありません。データを事前に与えることで、機械視覚や外部測定技術は不要です。
さらに、この方法で建設できる構造物のサイズは事実上無限です。唯一の制限は、建材の入手可能性にあります。また、建設できる構造物の種類に制限はありません。NASAは現在、ソーラーパネル、電気接続、シールドを含むボクセルタイプのライブラリを拡張しています。これにより、ロボットは次に何をすべきかを正確に知ることができます。
さらに、この技術を使用して建設された構造物は、分解して新しいデザインに再構成することで再利用可能です。この柔軟性は、構造物が変化するニーズや要件に適応できることを保証します。
近い将来、ARMADASロボットは検査ツールを装備し、今後の宇宙ミッションに欠かせない存在となるでしょう。この技術が実装される具体的なタイムラインはありませんが、現実になるまでにはかなりの時間がかかると予想されています。










{kind=link}